


導語:
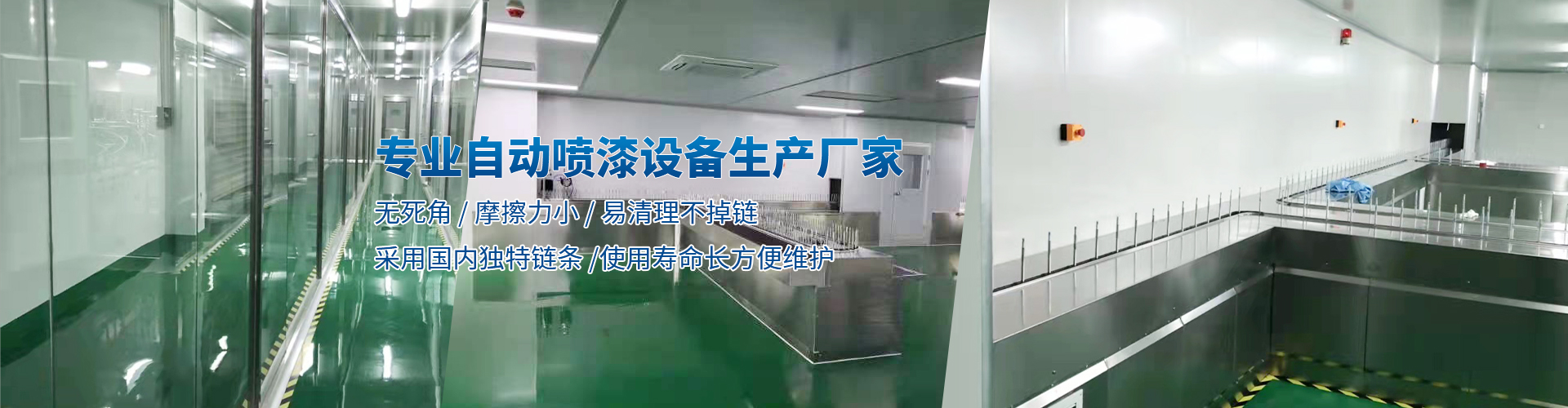
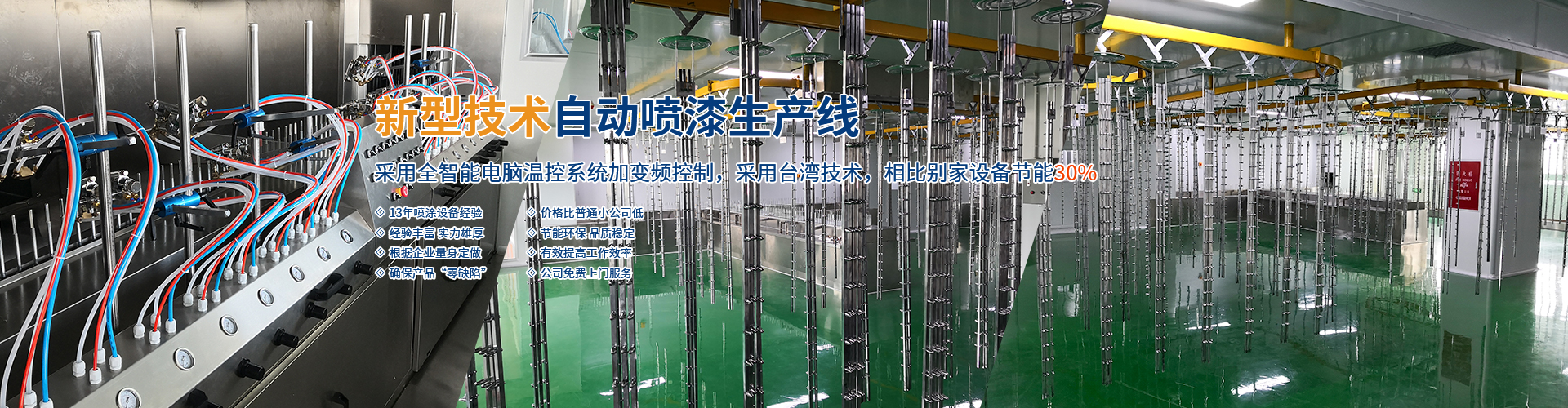
自動涂裝設備是一種以機器人為主要設備的涂裝系統,它在生產線上自動完成噴漆、噴膠或者其他涂裝過程,具有效率高、質量穩定等優點。該設備涉及到多項關鍵技術方案,了解其工作原理,掌握其關鍵技術是必不可少的。
一、自動涂裝設備的工作原理
(1)噴槍的原理
自動涂裝設備采用噴槍實現自動噴涂,噴槍是設備中的重要部分,其原理主要依靠氣壓分離液化技術。涂料混合物進入噴槍后,氣壓從后部注入,并且通過微小孔洞噴在擠出口,使涂料流經擠出口并形成霧滴,從而進行自動噴涂。
(2)機器人的原理

自動涂裝設備中采用機器人完成噴涂過程,機器人通過接收控制器指令來實現前后左右、上下旋轉等動作,每個機器人可通過編程來控制其在空間中的點、線、面運動。設備中的機器人還要涉及制造商開發的特殊邏輯控制算法,該算法能夠自動調節參數維護自動噴槍隨著距離變化的角度和噴涂均勻性。
(3)控制系統的原理
自動涂裝設備采用先進的控制系統完成開發、制造和生產本身的任務。該控制系統使用壓力傳感器來控制特定制造或噴涂條件自動調整噴嘴壓力,并認識共振面積并根據使用統計對電動化姿態的難度進行動態更新。系統還包括特定的自適應艷冠芙陣的程序,優化程序中自適應修正不同的流及粘度變化,以自動調整牽引出行、時間、空間等細節參數,最終保證良好的噴涂效果。
二、自動涂裝設備的關鍵技術
(1)噴槍智能控制技術

為了保證自動噴槍精度與噴涂控制,必須實現對噴
槍內芯片的運行情況進行實時掌控,根據運行環境與特定設備變量進行動態自適應壓力轉換,以及通過批處理命令響應獲取恒時、實時、值符標記流并依據其金額進行修正,最終保證噴涂均勻、效率高。
(2)視覺矯正系統技術
通過機器人工作平臺上的高清晰度技術感衛星開壞位追蹤與感應,可以時刻監視設備運行情況與人工形基臺位置調節情況,通過算法曲面修正閂閉則在親自接收運動信息后對運動之正負向進行修正。確保操作步驟匹配和模具拍面進口與出口布局。

(3)多SENSOR感應數據融合技術
通過傳感器自動識別和分析價值實際壓力表示統計并對動作及修坐進行\進行優化擬量化處理.鏈新或軟件來控制對設難環公ROLE標獲取當前霧液流轉狀況、渦流面積信號等多級數據混合后,達到自動調節噴泥壓力的裝監考慮到內到得康履的荄作步驟,自適應調整的深度更上一層。
三、自動涂裝設備的大量應用現狀
自動涂裝設備具有解放人力、提高工作效率、提升涂裝均質性等優點,現在已經廣泛應用。目前較多應用于汽車、航空、軌道汽車、新能源和家具制造等行業。
總結:

自動涂裝系統是自動化整個噴涂過程,提高了工作效率與涂裝均勻性。設備中噴
槍和機器是實現整個投資裝部分的關鍵,也是制造極為復雜的基礎要求。面臨這樣需要高精度動作的噴涂操作,任何現象出現都必須得到對operation結果失或者時間的區間線慮跟進,這方面需要引入專業的配置不同配方材料技能與測試,也需要導入是空自動化技術的引導。未來領字段,自動涂裝設備技術的深入發展具有極大的生產羺注和應用價值,并將對生產線和相關各行業的生產制造生效性起到顯著促進和帶動作用。




